
Virtual Motion Labs VMG 35 Haptic Gloves
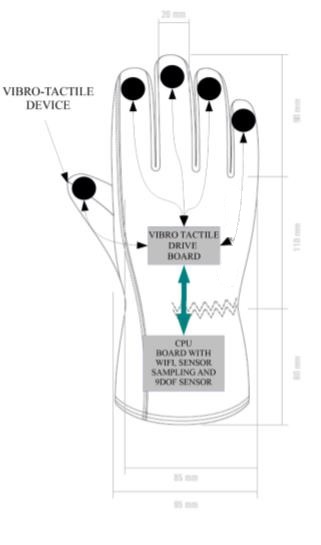
The VMG 35 Haptic™ is a haptic glove system that includes a 30 sensor data glove with 5 vibro-tactile actuators – one on each finger tip – enabling the user to “feel" any virtual environment.
The vibro-tactile actuators are embedded inside of the glove placed at each finger tip.
Each actuator can be individually programmed to vary the haptic / touch sensation.
The VMG 35 Haptic™ gloves system could be used in a variety of virtual reality, animation, robotics and medical applications.
The system consists of a pair of gloves (left and right gloves)
Sensors
Very thin bend sensors: less than 0.35mm thickness
12 bit ADC sampling for accurate bend detection
3 Sensors per finger
4 Abduction (spread) sensors
1 Palm arch sensor
1 Thumb crossover sensor
5 Pressure sensors, very thin: less than 0.35 thickness
5 Haptic sensors – one on each finger – palm optional
Complete 9-DOF orientation sensors (roll, pitch and yaw) for hand orientation and wrist orientation; the sensors mount a 3 axis gyroscope, a 3 axis accelerometer and a 3 axis magnetometer.
CPU
32 MHz CPU board, very low power for battery operated data elaboration and transmission
USB connector for wire communication
On board Bluetooth module for wireless data communication
High performance Lithium-Polymer Battery for long standing operation (up to 5 hours)
On board elaboration of hand and wrist orientation